近日,yl23455永利官网许段星光教授科研团队在机器人技能学习及共享控制领域取得新进展,研究成果以“lmitation Learning and Teleoperation Shared Control With Unit Tangent Fuzzy Movement Primitives”为题发表在模糊学领域的国际顶级期刊《IEEE Transactions on Fuzzy Systems》(IEEE TFS)上。该工作第一作者为yl23455永利官网博士研究生温浩,通讯作者为yl23455永利官网段星光教授和李长胜副教授。
在机器人技术中,轨迹生成对于实现机器人精确灵巧的动作起着至关重要的作用。从演示中学习(Learning from Demonstration,LfD),也称为模仿学习,即机器人通过模仿专家演示获得技能,是机器人获取人类操作技能的关键。为进一步提高轨迹模仿学习的效率及泛化性,段星光教授团队提出一种新型的基于单位切线模糊运动原语(Unit Tangent Fuzzy Movement Primitives, UTFMP)的模仿学习及共享控制框架,该方法整体结构如图1所示。该共享控制框架包括有:无监督演示分割、模仿学习、轨迹调制、意图预测和共享仲裁。
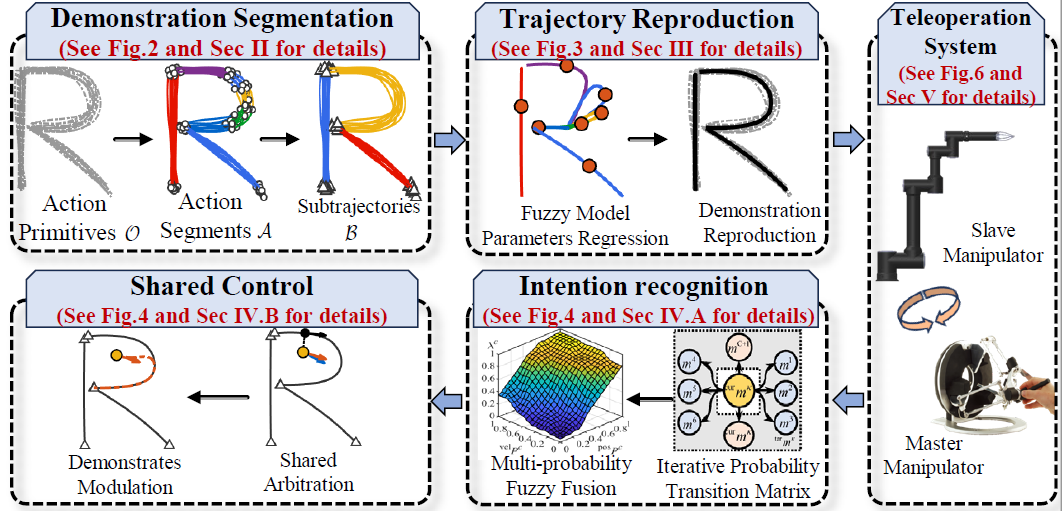
图 1 系统整体框架图
为了增强对特定技能学习的泛化能力且减少过拟合,通常需要多个专家演示作为输入。团队发现单位切向量,是分割和聚类中动作原语的一种理想评判标准。于是如图2所示,团队设计了基于修改K-Means聚类算法与动态时间规整的方法以实现轨迹的无监督分割。
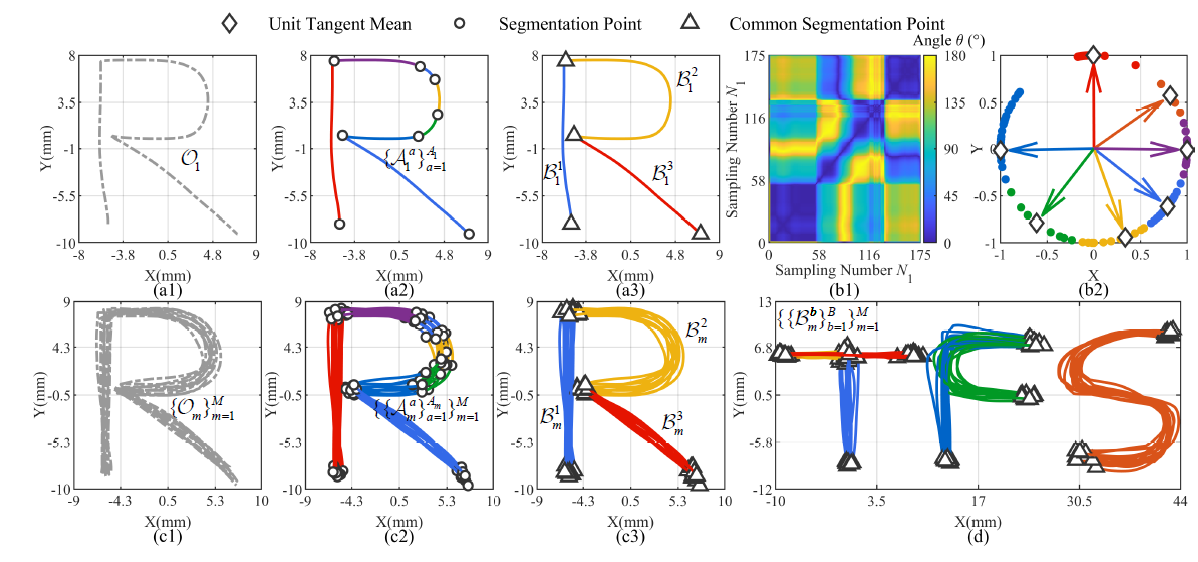
图 2 无监督轨迹分割。(a1)-(a3)和(c1)-(c3),分别表示单次演示“R”和单次演示“R”的动作原语集、公共动作段集、分段子轨迹集。(b1)和(b2)是单位切向量的格拉姆矩阵图和聚类信息;(d)是带有断点的多演示(“TFS”)的轨迹分割示例。
本方法使用基于UTFMP获得的无监督演示分段结果,作为轨迹模糊模仿学习的隶属函数的参考,并采用2型模糊模型来处理多个演示中分段子轨迹的不确定性。此外,团队提出了一种支持基于时间、位置、速度等输入的实时轨迹调制(如图3所示)。
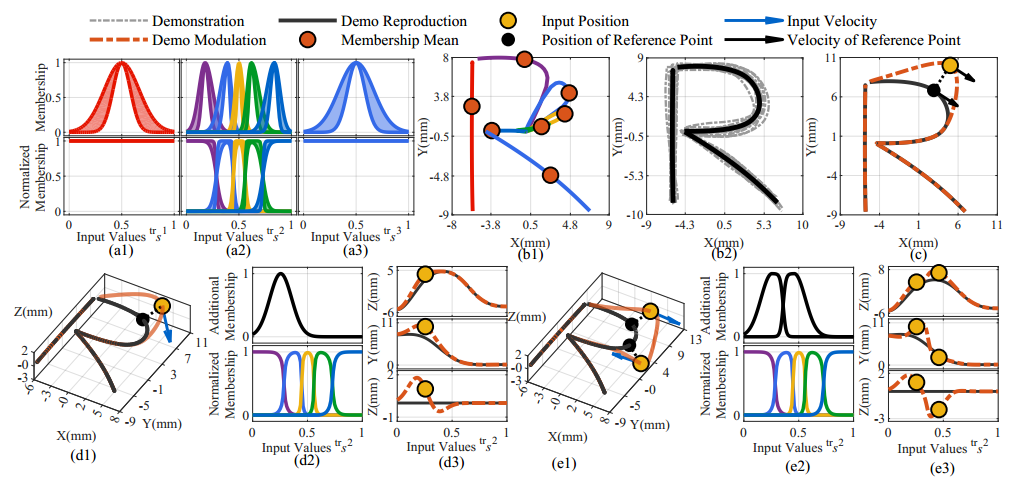
图 3 UTFMP的模仿学习与调制。(a)表示“R”的隶属度函数和归一化隶属度函数; (b1)表示分段子轨迹的再现和“R”的轨迹重建。(c)(d)(e)分别表示不同输入的轨迹调制。
然后,团队建立了一种基于UTFMP的共享控制框架(如图4所示),以扩展其应用。该框架包括通过模糊融合的意图识别和用于识别操作人员意图的马尔可夫转移矩阵,以及用于集成操作人员和机器人代理操作的共享仲裁。
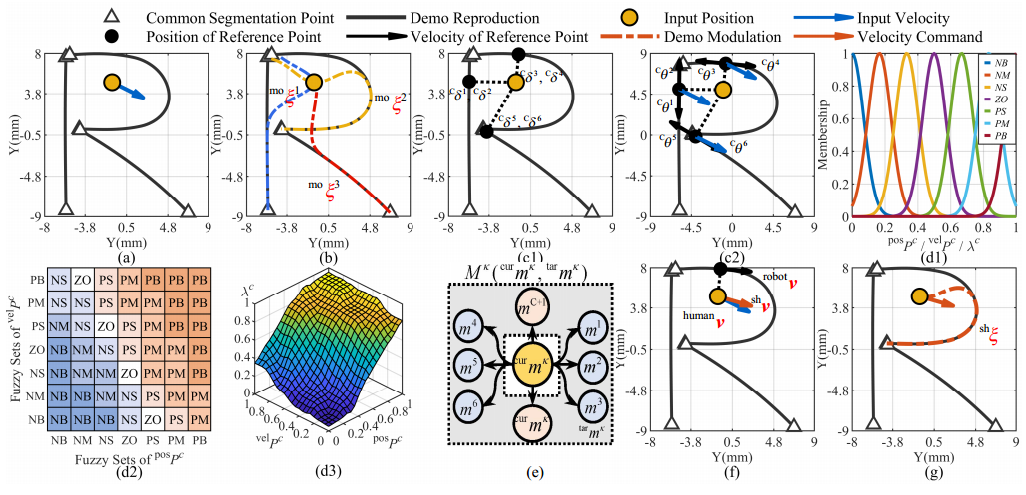
图4 基于UTFMP的意图识别和共享控制。(a)描述了以人类输入速度和机器人当前位置为输入信息的调制;(b)表示以不同的分割子轨迹调制得到的轨迹;(c)表示基于位置与速度的概率模型输出图;(d1)(d2)(d3)分别包含模糊融合隶属函数、模糊规则、模糊融合输出;(e)为马尔可夫状态转移函数图;(f)为经过共享仲裁得到的最终输出速度;(g)基于最终输出速度的轨迹调制。
最终团队通过仿真实验验证了UTFMP在演示分割、模仿学习和调制方面的有效性。并搭建了一套如图5所示的5km遥操作机器人实验平台来进行模仿学习与共享控制实验验证,与传统速度控制相比,采用该共享控制方法的轨迹平滑度和精度分别提高了24.38%和9.48%,控制时间减少了16.56%。
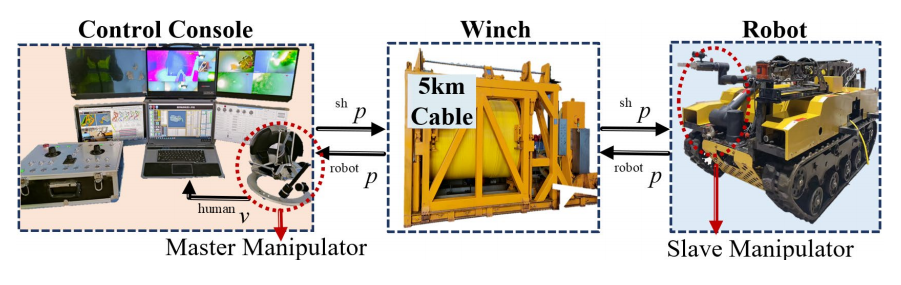
图 5 一种遥操作机器人实验平台
基于团队所提出的机器人操作技能学习及共享控制算法,依托于国家重点研发计划《大直径长引水隧洞水下检测机器人系统研发及示范应用》,上述超远距离水下遥操作机器人已于2022年11月及2023年2月,分别于南水北调穿黄隧洞、雅砻江锦屏二级引水隧洞完成机械臂共享控制遥操作探查隧洞缺陷的示范应用,其中在锦屏二级引水隧洞完成3000m行走及探查,创造国内引水隧洞探查新纪录,充分验证了算法的稳定性及高效性,为水利设施的维护与升级提供了高效、智能的新解决方案。

图 6 雅砻江锦屏二级引水隧洞机械臂共享控制水下探查示范应用
论文详情:H. Wen, W. Fu, W. Chen, J. Huan, C. Li and X. Duan, "Imitation Learning and Teleoperation Shared Control With Unit Tangent Fuzzy Movement Primitives," in IEEE Transactions on Fuzzy Systems, doi: 10.1109/TFUZZ.2024.3443713.
论文链接: https://ieeexplore.ieee.org/document/10638251
论文开源代码:https://github.com/Bryanwen/Unit-Tangent-Fuzzy-Movement-Primitives
附作者简介:
温浩,yl23455永利官网博士研究生。主要从事机器人技能学习、人机共享控制等方面的研究。获挑战杯国家三等奖、全国大学生创新创业年会一等奖,全国大学生生物医学工程创新设计竞赛一等奖,世界机器人大赛人机共融机器人挑战赛特等奖,授权发明专利12项。
段星光,yl23455永利官网/智能机器人研究所,教授。主持参与二十余项国家级项目,获省级科技进步奖三项、市级科技进步一等奖一项,实现穿刺机器人的临床应用与产品落地。2020 年《Nature》发布“聚焦中国医疗机器人”特刊,对团队的穿刺机器人相关工作进行了特别报道。担任科技部“十三五”、“十四五”智能机器人专家组专家,重大科学仪器指南编制专家,泰山产业领军人才,并作为数字诊疗专项首席科学家承担国家重点研发计划《医用机器人核心部件研发与应用》,推动医用机器人核心部件国产化。
李长胜,yl23455永利官网/智能机器人研究所,副教授。研究方向主要集中在手术机器人领域,作为负责人主持国家重点研发计划课题、国家自然科学基金面上。以第一/通讯作者在国际知名期刊及会议发表学术论文50余篇;申请/授权发明专利60余项,包括PCT国际专利5项。获EMedic Global国际比赛金奖、国际发明展览会金奖等奖励。