yl23455永利官网智能机器人研究所黄强教授与王化平副教授的微纳生物操作团队在微纳机器人与生物医学工程领域取得重要进展,1月18日,该研究成果“面向环境自适应定位、采样与释放的离子响应形变微机器人执行器”(Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling),以研究长文(Research Article)形式在线发表于自然子刊《自然•通讯》 (Nature Communications)。该成果首创了以单一可降解生物材料实现微机器人在环境感知下的自形变,从而解决了微机器人在人体等活体封闭环境下进行无创采样、运输、投递与回收等一体化作业的难题,这将在癌症等重大疾病精准医疗领域产生深远意义。
高精尖中心、yl23455永利官网黄强教授与王化平副教授为论文通讯作者,博士生郑志强为论文第一作者,石青教授、董立新教授等全程参与了研究工作。yl23455永利官网是该论文唯一完成单位。
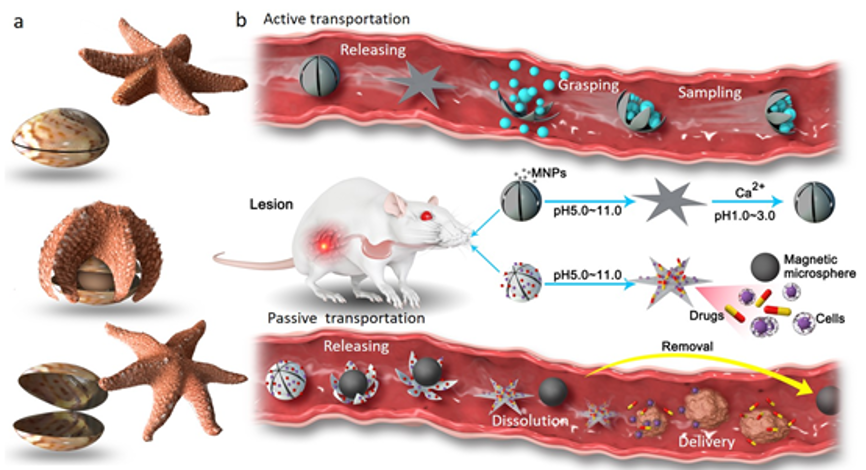
图1 环境感知自形变微机器人在动物体内作业机理示意图及研究思路
面对癌症发病率日益增高的现实,科学家们一直致力于开发微机器人取代传统手术,实现无创病理采样、药物精准投放等功能,为患者提供更为安全、直接、有效的治疗方式。目前,微机器人的运动与形变大多通过人为提供驱动力和形变刺激源遥控实现,整个过程需要实时监测机器人的位置与状态,以便确认何时何地发送形变指令开展作业。鉴于人体等活体环境实时监测手段与反馈信息的局限性,开发具有自主形变功能的智能化微机器人,对于有效减少人为介入、大幅提升活体作业的可行性与灵活性具有重要意义。
生物环境感知—让微机器人“智能化”
该团队发现褐藻酸水凝胶在非均一电沉积交联固化后具有不同局部密度,受离子浓度、pH值变化的激励可进一步发生交联或分解反应从而积累局部应变,在整体结构上展现为形变与开合。由于离子、pH均为人类等活体中天然存在的环境,该发现激发了团队研发具有生物环境感知自主形变微机器人的灵感。
受海星捕食贝类运动过程的启发,团队以该非均一化水凝胶构建了仿海星微机器人,使其柔性触手能够在液体环境下以自主形变有效贴合任意目标的外部轮廓进行抓取与释放。通过非均匀电场交联固化,具有不同密度的水凝胶网络被嵌入到仿海星微机器人的褐藻酸单层薄膜结构中,在微机器人进入人体等活体消化系统后,即能感应pH环境(胃pH:1-3、肠道pH:6-8)自主形变。
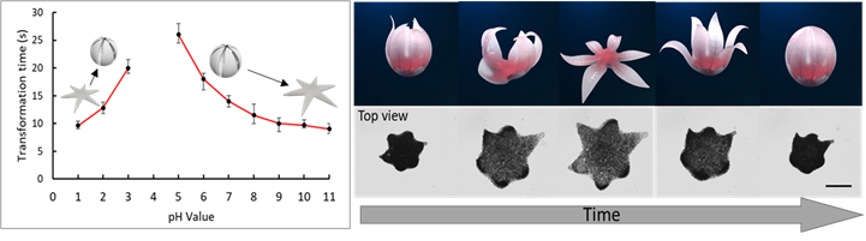
图2 仿海星微机器人在pH环境感知下的自主形变(比例尺:500μm)
仿海星微机器人可模仿海星的多种驱动模式。如通过捕获磁性微球,以“搭便车”的形式随磁球在磁场作用下被动运动,或通过机器人体内封装磁性纳米材料实现磁驱主动运动。最后,在到达目标区域后,通过自主形变调整姿态完成贴附、投递、采样等不同作业任务。这种由水凝胶单一材料构建的全新微机器人还具有完全的生物可降解性,能够解决活体封闭环境下完成作业后的回收难题。
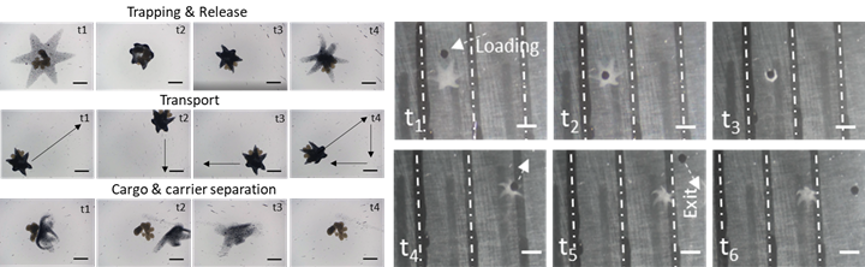
图3 微机器人在主动式、被动式运动下作业(比例尺:500μm)
通过有效利用这种水凝胶网络定制化嵌入策略,团队未来将继续探索任意形貌单层自主形变微机器人结构的剪裁技术,为微机器人模仿生物世界各种软体形变铺平新的道路,为复杂封闭活体环境下的自适应精密生物微操作提供使能支撑,在未来如心脑血管溶栓、溃疡性结肠炎、肿瘤等病灶药物长效释放等精准医疗与组织修复等方面实现微机器人形态与功能的多元化。
团队介绍
北理工生物微纳操作团队依托yl23455永利官网和高精尖中心,面向世界前沿,在微纳机器人、微纳生物制造等方面已开展了一系列研究,相关成果发表在Nature Communications,ACS Applied Materials & Interfaces,Lab on a Chip、Biofabrication、IEEE Trans汇刊等国际知名期刊。此次论文以研究生作为唯一第一作者,由本团队与名古屋等国际知名高校联合培养,展现了团队围绕科技前沿的国际化人才培养模式积极探索取得阶段性进展。同时,表明了团队在微纳机器人技术领域的研究在国际上的影响力稳步提升。
论文下载地址:https://www.nature.com/articles/s41467-020-20697-w